三维桥式吊车实验控制系统
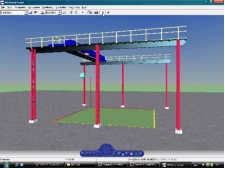
三维桥式吊车负载能力强、操作灵活,在工业与运输领域有着广泛的应用。但是,桥式吊车是一种典型的非线性、强耦合、欠驱动系统,要实现对其安全高效的控制面临着许多困难,因此,这类系统的控制已经成为当前的研究热点。根据真实桥式吊车系统的组成结构设计的实验系统REI-BC-3D,主要包括支撑框架、桥架、台车以及负载,驱动装置主要包括3台伺服电机,它们分别负责为桥式吊车系统提供台车沿方向运动驱动力、台车与桥架沿方向运动的驱动力以及提升负载的卷轴驱动力,负载可以由支撑框架结构空间中的任意起点运动到任意终点,此过程中三个方向同时运动且使台车快速、准确定位,负载晃动尽可能地小,即实现三维桥式吊车的快速、准确定位与防摆控制。该实验系统为高校进行此类控制研究的老师和学生提供了一个理想平台。

设备特点:
n 先进性: 系统采用PC机+运动控制器的开放式控制平台,符合当前先进自动控制技术的发展方向。
n 高精度:驱动装置采用工业级伺服电机和精密减速器,反馈元件选用工业级增量编码器,系统控制精度高。
n 安全性:采用光电限位开关和防碰撞缓冲装置双重保护,使系统具有优越的安全性能。
n 创新性:利用SIMULINK系统函数编写基于C/C++语言模板的自定义函数库,建立SIMULINK与被控对象的通讯,在不借助其他外部硬件的条件下实现了半实物仿真控制。
n 开放性:采用开放式控制架构,提供丰富的函数接口,控制软件源代码完全开放,并提供二次开发技术文档,适合控制理论的教学与研究。
研究方向
Ø 系统动力学建模分析与仿真
Ø 模糊控制等智能控制算法研究
Ø 滑模变结构仿真与控制研究
Ø 自抗扰控制策略研究
Ø 变绳长防摆与定位控制研究
实验内容
u 实验1. 运动控制基础实验
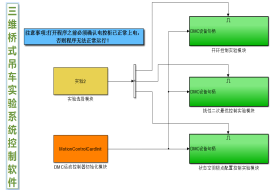
u 实验2. 开环控制实验
u 实验3. PID控制实验
u 实验4. 状态空间极点配置控制实验
u 实验5. 线性二次型最优控制实验
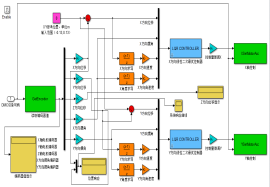
系统仿真
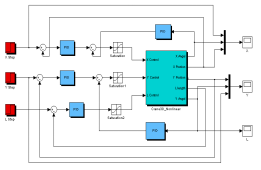
实验软件